





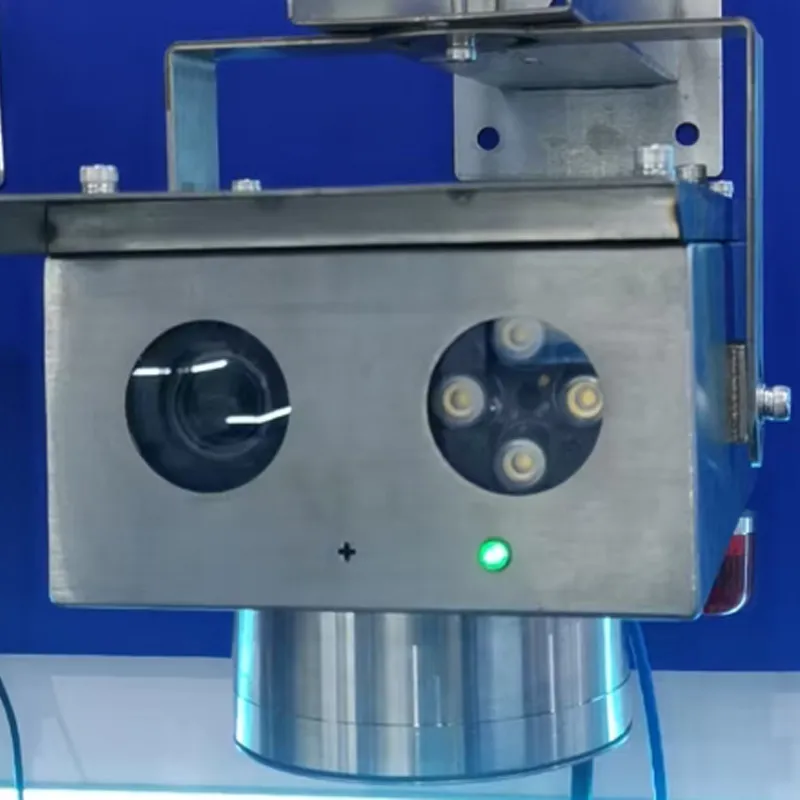
Серия глубоководных подводных поворотных платформ(Поддержательная платформа для видеокамеры)
Когда слышишь ?поддержательная платформа для видеокамеры?, многие представляют себе простой кронштейн. Но в глубоководных условиях, особенно для взрывозащищенного видеонаблюдения в шахтах, это целая инженерная система. Ошибка — думать, что главное это камера, а платформа лишь держит её. На деле, отказ поворотной платформы под давлением или в агрессивной среде сводит на нет всю систему. У нас в работе были случаи, когда заказчик сэкономил на узле поворота, а потом месяцами не мог получить стабильную картинку с заданных углов — механику клинило, герметизация нарушалась.
От чертежа до шахты: где кроются проблемы
Разработка серии таких платформ — это всегда компромисс между подвижностью, грузоподъемностью и надежностью. Возьмем, к примеру, модель для установки на подземных конвейерных линиях. Техзадание требует панорамирования на 350 градусов с точностью позиционирования. Казалось бы, стандартная задача для сервопривода. Но когда начинаешь учитывать постоянную вибрацию от работающего конвейера, пылевую взвесь в воздухе и необходимость работы при повышенной влажности, все усложняется. Недостаточно просто взять промышленный мотор и заключить его в корпус.
Помню один проект для угольного разреза. Платформа с камерой должна была монтироваться на подвижной стреле. Конструкторы сделали упор на защиту от ударов, использовали толстостенный корпус из нержавеющей стали. Все испытания на стенде прошли идеально. А на объекте через две недели начались сбои в управлении поворотом. Оказалось, в расчетах не учли перепады температур от дневной эксплуатации к ночной остановке, внутри корпуса образовывался конденсат. Электроника начала ?плавать?. Пришлось экстренно дорабатывать систему внутреннего осушения и термостабилизации. Это был урок: стендовые испытания не имитируют долгосрочное воздействие реальных циклов ?работа-покой? в изменчивой среде.
Именно поэтому компании, которые специализируются на полном цикле, от разработки до обслуживания, имеют преимущество. Вот, например, ООО ?Цзянсу Аньцзинь Электрическая Технология?. Если зайти на их сайт https://www.jsajdq.ru, видно, что они позиционируют себя как предприятие полного цикла, фокусируясь на взрывозащищенном и рудничном оборудовании. Это важный момент. Когда один производитель отвечает и за камеру, и за платформу, и за систему управления, проще устранить ?межфазные? проблемы — те самые, когда механика не дружит с электроникой, а протоколы связи не оптимизированы под реальные задержки в шахтной сети.
Ключевые узлы и их ?болевые точки?
Давайте разберем по косточкам. Основной узел — это механизм поворота. Шаговые двигатели хороши для точности, но боятся резких перегрузок. Если платформу задевает проходящая техника или происходит обвал породы, мотор может выйти из строя. Более надежными в таких ?грубых? условиях часто оказываются гидравлические или пневматические приводы, но они сложнее в управлении и требуют дополнительных линий. Выбор всегда зависит от конкретной задачи. Для стационарного поста наблюдения за забойной зоной подойдет шаговый двигатель с планетарным редуктором в усиленном исполнении. А для мобильной разведочной тележки — возможно, гидропривод от общего контура.
Второй критический узел — герметичный кожух и система ввода/вывода кабелей. Это кажется мелочью, но большинство отказов происходит именно здесь. Кабельный ввод должен выдерживать не только давление, но и постоянные изгибы при повороте платформы. Использование стандартных сальниковых уплотнений приводит к их истиранию и протечкам. Мы перешли на специальные коаксиальные вращающиеся соединения (силовые и для передачи данных) для критических линий, что резко повысило ресурс. Но это удорожает конструкцию, и не каждый заказчик готов это понять на этапе обсуждения сметы.
Третий момент — система балансировки. Когда на платформу устанавливается не просто камера, а камера с мощным ИК-прожектором, защитным кожухом, а иногда и сенсорами газа, центр тяжести смещается. Если его не компенсировать, двигатель работает с перегрузкой, увеличивается люфт, страдает точность позиционирования. В наших прототипах мы вводили регулируемые противовесы внутри поворотного узла, что позволяло адаптировать одну модель платформы под разные конфигурации полезной нагрузки. Это оказалось востребованной фичей.
Интеграция в систему: больше, чем монтаж
Самая сложная часть начинается после того, как железо готово. Глубоководная подводная поворотная платформа — это не автономное устройство. Она должна бесшовно интегрироваться в систему управления видеонаблюдением шахты или подземного объекта. Здесь возникает проблема протоколов. Многие готовые камеры используют распространенные интерфейсы типа RS-485 или современные промышленные Ethernet. Но драйвер управления платформой должен понимать команды от той же системы, что и управляет камерой (зум, фокус). Часто приходится писать промежуточное ПО-прослойку, которое транслирует команды.
На одном объекте мы столкнулись с тем, что система диспетчеризации заказчика отправляла команды на предустановленные позиции (Preset) с задержкой. Платформа успевала повернуться, а камера — нет. В итоге на монитор приходила картинка еще с предыдущей позиции, что вызывало путаницу. Решение было не в апгрейде ?железа?, а в тонкой настройке таймингов в управляющем контроллере и введении подтверждающего сигнала от камеры о готовности кадра. Такие нюансы не описаны в учебниках, они познаются на практике.
Компании, которые занимаются полным циклом, как упомянутая ООО ?Цзянсу Аньцзинь Электрическая Технология?, часто имеют свои наработанные библиотеки интеграции для различных SCADA-систем. Это их сильная сторона. Они не просто продают платформу, а предлагают решение, которое уже ?притерто? к типовым задачам рудничного видеонаблюдения, будь то мониторинг конвейерных лент, контроль загрузки вагонеток или наблюдение за опасными зонами забоя. Их сайт https://www.jsajdq.ru указывает на специализацию именно в этой нише, что предполагает глубокое понимание контекста.
Эволюция требований и взгляд вперед
Раньше главным было ?увидеть?. Сейчас требуется ?увидеть, проанализировать и предупредить?. Современные поддержательные платформы для видеокамеры все чаще становятся носителями не только камер, но и аналитических модулей. На платформу могут устанавливаться тепловизоры для обнаружения перегрева оборудования, лазерные сканеры для построения 3D-карты выработки или датчики для анализа состава воздуха. Это ставит новые задачи по пропускной способности каналов передачи данных и, опять же, по балансировке.
Еще один тренд — отказ от кабелей там, где это возможно. Но беспроводная передача видео и данных в условиях глубоких подземелий или под водой — это отдельная большая тема. Радиоволны плохо распространяются в лабиринтах выработок, а акустические подводные каналы имеют малую пропускную способность. Поэтому пока магистральные линии остаются кабельными. Но сама платформа может быть частью гибридной сети, получая питание по кабелю, а управляющие сигналы — по защищенному радиоканалу в пределах локальной зоны.
Что хотелось бы улучшить в будущем? Унификацию интерфейсов. Слишком много времени уходит на адаптацию. И повышение ремонтопригодности в полевых условиях. Сделать узел поворота модульным, чтобы при отказе его можно было заменить на месте, не демонтируя всю конструкцию и не нарушая герметичность соседних отсеков. Это сложная инженерная задача, но ее решение сильно сократит время простоя системы.
Заключительные мысли: надежность как результат деталей
Итак, разработка и применение серии глубоководных подводных поворотных платформ — это далеко не про ?крутящуюся подставку?. Это комплексная задача на стыке механики, материаловедения, электроники и теории управления. Успех определяется вниманием к сотне мелких деталей: от выбора сорта стали для вала и типа смазки, работающей при отрицательных температурах, до алгоритма плавного разгона и торможения двигателя, чтобы не ?срывало? изображение.
Опыт, в том числе и негативный, как с тем конденсатом, бесценен. Он заставляет не просто следовать ГОСТам, а думать на шаг вперед, моделируя реальные условия эксплуатации. Именно поэтому для ответственных объектов в горнодобывающей отрасли или подводной инфраструктуре выбор часто падает на производителей с полным циклом и узкой специализацией. Они уже наступили на многие грабли и заложили решения в свои продукты. Как, судя по описанию, это делает ООО ?Цзянсу Аньцзинь Электрическая Технология?, фокусируясь на взрывозащищенном и рудничном сегменте. В этом и есть суть: надежная платформа рождается не в идеальном КБ, а на стыке конструкторской мысли и сурового опыта поля.
В конце концов, вся эта сложная конструкция нужна для одной простой цели: чтобы диспетчер или система безопасности в любой момент получили четкую, стабильную картинку с нужного ракурса. И когда это работает годами в условиях, где обычная электроника живет минуты, понимаешь, что все эти хлопоты с подшипниками, герметиками и протоколами были не зря.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 KBA12D Рудничная видеокамера во взрывобезопасном исполнении
KBA12D Рудничная видеокамера во взрывобезопасном исполнении -
 Взрывозащищенная инфракрасная купольная видеокамера (с дворником)
Взрывозащищенная инфракрасная купольная видеокамера (с дворником) -
 KJJ660 Рудничный кольцевой гигабитный коммутатор во взрывозащищенном и взрывобезопасном исполнении
KJJ660 Рудничный кольцевой гигабитный коммутатор во взрывозащищенном и взрывобезопасном исполнении -
 Взрывозащищенная видеокамера с выносной ИК-подсветкой и дворником
Взрывозащищенная видеокамера с выносной ИК-подсветкой и дворником -
 KDW127-12 Рудничный стабилизированный источник постоянного тока в заливном и взрывобезопасном исполнении
KDW127-12 Рудничный стабилизированный источник постоянного тока в заливном и взрывобезопасном исполнении -
 KBA127H Рудничная видеокамера со встроенной ИК-подсветкой во взрывозащищенном и взрывобезопасном исполнении
KBA127H Рудничная видеокамера со встроенной ИК-подсветкой во взрывозащищенном и взрывобезопасном исполнении -
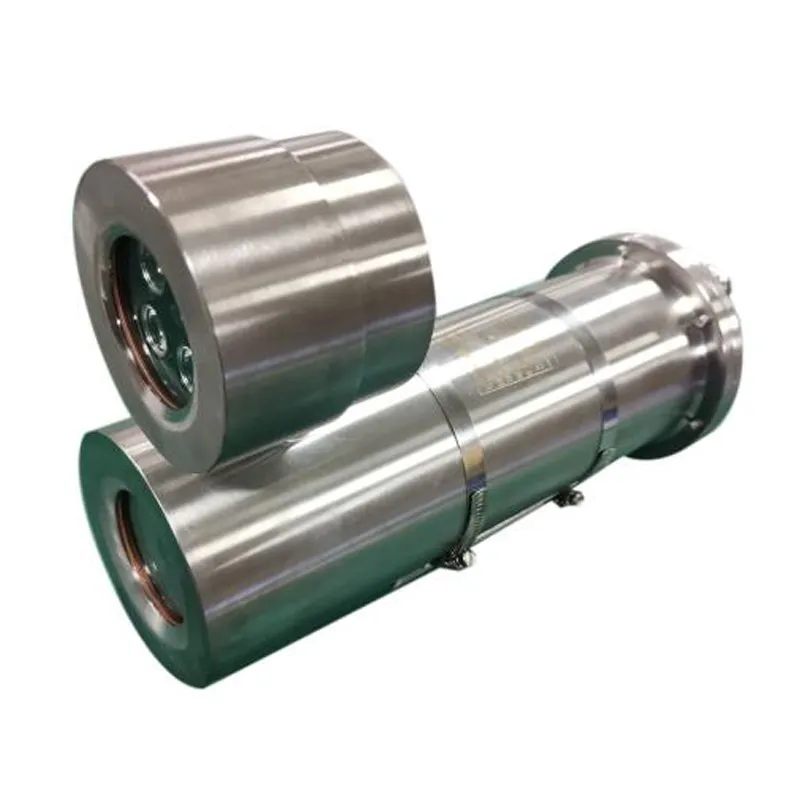
 Серия глубоководных подводных поворотных платформ(Поддержательная платформа для видеокамеры)
Серия глубоководных подводных поворотных платформ(Поддержательная платформа для видеокамеры) -
 Взрывозащищенный видеомонитор
Взрывозащищенный видеомонитор -
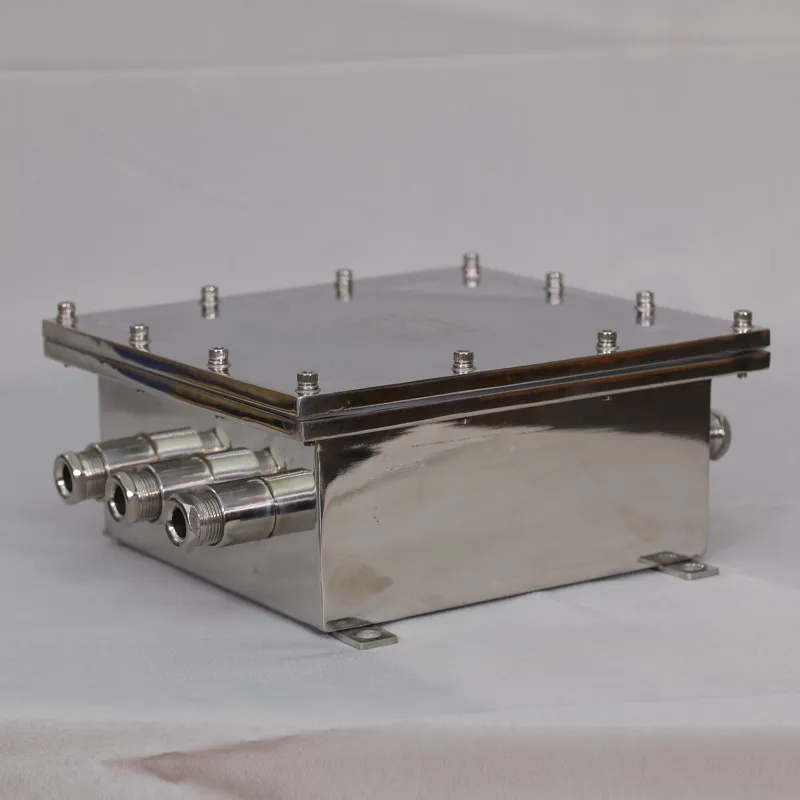 BXJ-51 Взрывозащищенная коммутационная коробка
BXJ-51 Взрывозащищенная коммутационная коробка -
 Взрывозащищенная тепловизионная видеокамера
Взрывозащищенная тепловизионная видеокамера -
 KDW660-24B Рудничный стабилизированный источник постоянного тока во взрывозащищенном и взрывобезопасном исполнении
KDW660-24B Рудничный стабилизированный источник постоянного тока во взрывозащищенном и взрывобезопасном исполнении -
 Взрывозащищенная горизонтальная моноблочная видеокамера
Взрывозащищенная горизонтальная моноблочная видеокамера
Связанный поиск
Связанный поиск- Рудничная камера с обработкой изображения
- Рудничная беспроводная камера
- Взрывозащищенная сферическая видеокамера (ИК)
- детектор утечки метана
- Взрывозащищённая полусферическая камера
- Рудничная взрывозащищённая и искробезопасная ИК-камера
- взрывозащищенные распределительные щиты
- Взрывозащищённая гибкая труба
- камера видеонаблюдения уличная промышленная
- Камера с детектором монооксида углерода