





Подводная поворотная платформа для видеокамеры
Когда слышишь ?подводная поворотная платформа для видеокамеры?, многие сразу представляют себе просто водонепроницаемый корпус с моторчиком. Это главное заблуждение. На деле, ключевое здесь – не ?поворотная?, а ?подводная?. Разница в среде диктует всё: от выбора материалов и уплотнений до логики управления. Я сталкивался с проектами, где инженеры, отлично разбирающиеся в наземных PTZ-камерах, терпели фиаско, пытаясь адаптировать их для глубины, просто добавив герметичный кожух. Вода, особенно под давлением, солёная или с абразивными взвесями, выявляет любую слабость конструкции за считанные часы.
Сердце системы: привод и герметизация
С поворотным механизмом на воздухе всё относительно просто – шаговый двигатель, редуктор, подшипники. Под водой первым камнем преткновения становится именно привод. Прямой вынос вала двигателя наружу требует сложнейшего сальникового уплотнения, которое при постоянном вращении и давлении – потенциальная точка отказа. Более надёжный путь – использование герметичного поворотного трансформатора (например, синусно-косинусного) или магнитно-связанной пары. Внутри сухого отсека – статор, снаружи, в воде, – ротор, связанные магнитным полем через стенку из нержавейки. Это исключает протечку по валу. Но и тут есть нюанс: материал перегородки должен быть немагнитным (типа нержавеющей стали AISI 316), иначе магнитное поле экранируется.
В одном из наших ранних прототипов для мониторинга гидротехнических сооружений мы как раз попались на этом. Использовали обычную сталь для гермокорпуса – и момент на выходе оказался катастрофически слабым. Платформа еле вращалась под нагрузкой от течения. Пришлось пересчитывать и менять всю компоновку.
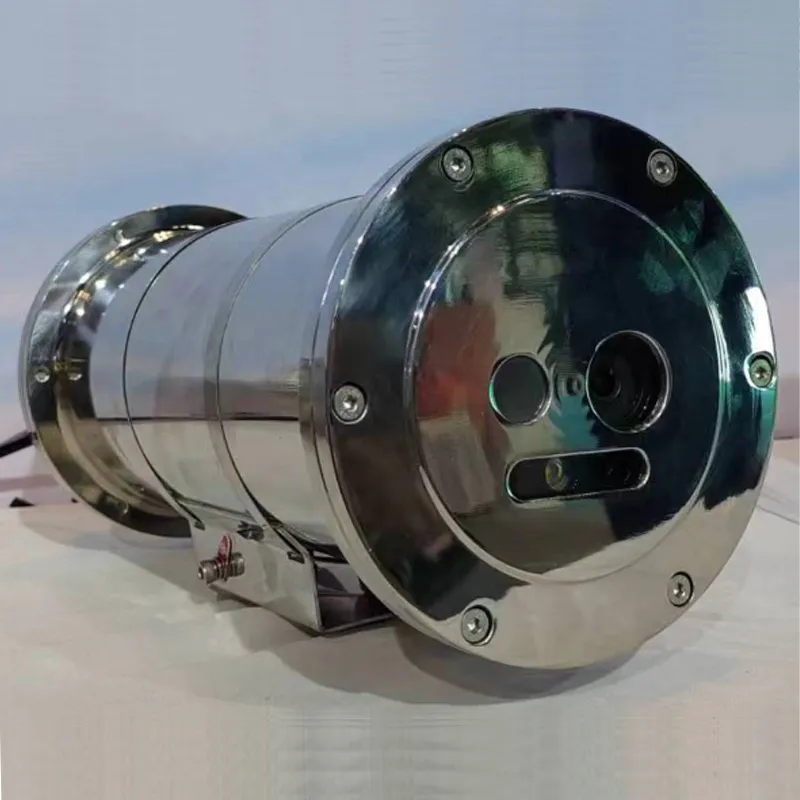
Герметизация самого корпуса камеры – отдельная песня. Здесь нельзя полагаться на стандартные резиновые кольца круглого сечения для статичных соединений. Для крышек, которые теоретически могут сниматься для обслуживания, нужен профилированный уплотнитель, часто с двойной губкой. А для оптического окна перед объективом – не просто стекло, а просветлённое, с антибликовым покрытием, и его посадка в корпус должна компенсировать разницу коэффициентов теплового расширения стекла и металла. Иначе при перепаде температур (скажем, при подъёме с глубины) либо треснет стекло, либо потечёт стык.
Среда применения: от чистых бассейнов до шахтных вод
Здесь и кроется основное разделение. Универсальной подводной платформы не бывает. Для аквариумов или чистых резервуаров сгодится конструкция из анодированного алюминия или даже определённых пластиков. Но когда речь заходит о промышленных или, что сложнее, о горнодобывающих задачах, в игру вступают жёсткие стандарты.
Например, для работы в шахтных водах, которые могут быть химически агрессивными и содержать взрывоопасные газы (метан, угольная пыль), требуется не просто влагозащита. Нужно взрывозащищённое исполнение. Это означает, что вся платформа, включая каждый моторчик и разъём, должна соответствовать стандартам вроде РВ Ex (взрывонепроницаемая оболочка) или искробезопасной цепи. Любая искра внутри или снаружи – риск детонации. Это накладывает ограничения на мощность двигателей, нагрев элементов и, конечно, на стоимость.
Именно в этом сегменте я обратил внимание на продукты компании ООО ?Цзянсу Аньцзинь Электрическая Технология?. Их профиль – взрывозащищённое и рудничное оборудование для видеонаблюдения, что говорит о глубокой специализации в самой сложной среде. Если судить по их портфолио на https://www.jsajdq.ru, они понимают, что для шахты или нефтехимии подводная платформа – это не просто камера в боксе, а часть комплексной системы безопасности, где надёжность абсолютно критична. Их подход как производственного предприятия полного цикла, от НИОКР до обслуживания, здесь логичен – такие системы требуют полного контроля над цепочкой.
Электроника и управление: тонкости под водой
Ещё один момент, о котором часто забывают, – это управление и передача данных. Витая пара или обычный коаксиальный кабель в силиконовой изоляции – не вариант для постоянного погружения. Нужны кабели с двойной, а то и тройной изоляцией, с армированием против растяжения (если платформа подвешена и её может болтать течением). Разъём – это отдельная история. Он должен быть герметичным, часто с резьбовым соединением и собственным уплотнительным узлом. Лучшие образцы заполняются гелем для полного вытеснения воды.
Сам блок управления, который отдаёт команды на поворот, наклон, зум, должен быть спроектирован с учётом задержек сигнала. На больших глубинах и длинах кабеля (сотни метров) даже цифровой сигнал (например, по RS-485 или Ethernet с использованием специфических протоколов) может испытывать задержки. Алгоритм позиционирования должен это компенсировать, имея обратную связь не только по энкодеру мотора, но и, возможно, по отдельному датчику положения. Иначе команда ?повернуться на 30 градусов? выполнится с ошибкой, которая будет накапливаться.
В моей практике был случай с системой наблюдения в порту. Платформа, получая команды с берегового поста по кабелю длиной около 400 метров, периодически ?теряла? своё нулевое положение. Оказалось, что из-за падения напряжения в линии и наводок от силовых кабелей, сигнал с энкодера считывался с ошибками. Решение было не в усилении сигнала, а в переходе на более помехозащищённый протокол связи и добавлении простого механического концевика для калибровки ?домашней? позиции при каждом включении.
Практика и обслуживание: что не пишут в паспорте
Любая, даже самая дорогая подводная поворотная платформа для видеокамеры требует регулярного внимания. И это не только протирка стекла от обрастаний (для чего иногда ставят скребки или форсунки для подачи сжатого воздуха/воды). Главное – профилактика уплотнений. После каждого длительного цикла работы, особенно в солёной воде, необходимо проверять состояние сальников и колец. Морская вода ?съедает? даже нержавейку, если это не правильная марка.
Частая ошибка при монтаже – неправильная ориентация кабельного ввода. Он должен выходить вверх, образуя так называемую ?водозащитную петлю?, чтобы вода по кабелю не стекала прямиком в соединение. Кажется очевидным, но на авариях это одна из распространённых причин.
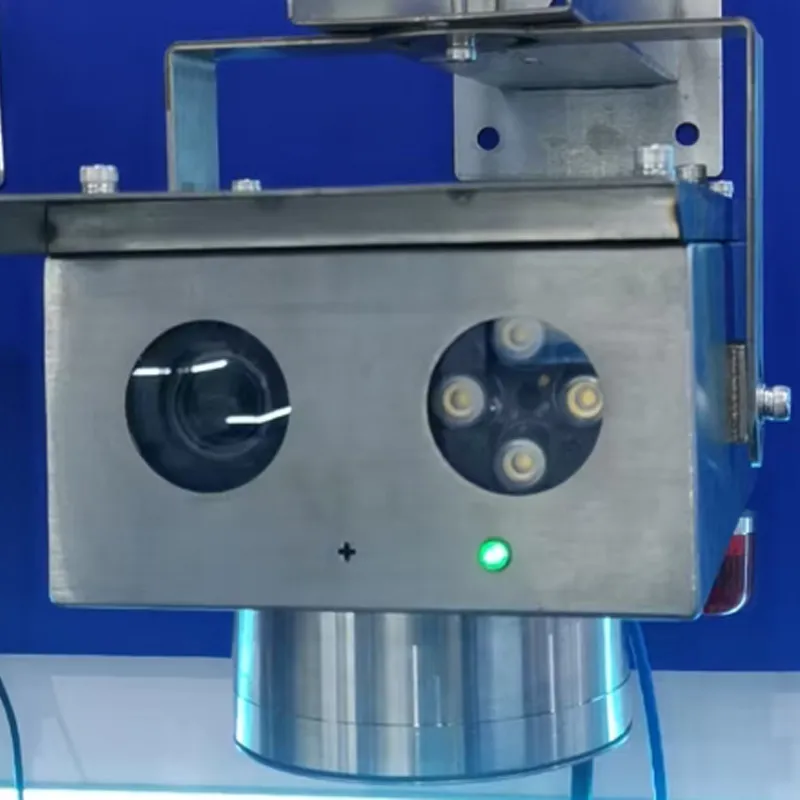
Ещё один практический совет касается балансировки. Камера с трансфокатором – устройство, центр тяжести которого смещается при изменении фокусного расстояния. Если платформа рассчитана на определённый момент и жёстко сбалансирована под одно положение зума, при его изменении двигателю придётся работать с переменной нагрузкой. В лучшем случае это приведёт к повышенному износу, в худшем – к заклиниванию или неточному позиционированию. Хорошие системы либо используют камеры с небольшим диапазоном изменения центра тяжести, либо имеют адаптивное управление двигателем, компенсирующее этот дисбаланс.
Взгляд в будущее: интеграция и аналитика
Сегодня подводная поворотная платформа перестаёт быть изолированным устройством. Всё чаще это узел в сети датчиков. Например, её работа может быть привязана к данным сонара: получив сигнал о движении объекта в определённом секторе, система автоматически наводит камеру на эту точку для визуальной идентификации. Или, в аквакультуре, платформа может работать в тандеме с датчиками качества воды, фокусируясь на зонах с аномальными показателями.
Это требует уже не просто механической надёжности, но и интеллектуальной начинки. Возможность работать по заранее заданным патрульным маршрутам, детектировать конкретные объекты (например, повреждения на корпусе судна или браконьерские сети), интегрироваться в промышленные IoT-системы – вот что будет отличать следующее поколение устройств.
Компании, которые, как ООО ?Цзянсу Аньцзинь Электрическая Технология?, заточены на полный цикл – от исследований до обслуживания, находятся в выгодном положении. Они могут отрабатывать такие комплексные решения не на абстрактных тестах, а в реальных условиях на объектах заказчиков, будь то рудники, порты или гидроэлектростанции. Их специализация на взрывозащищённом оборудовании задаёт высокую планку качества для всех остальных продуктов, включая ?обычные? подводные платформы. В конце концов, если устройство может работать в шахте, насыщенной метаном, то в условном чистом водоёме оно проработает десятилетия. И в этом, пожалуй, и заключается настоящая профессиональная оценка любой техники – по её работе в самых жёстких условиях.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Взрывозащищенная тепловизионная видеокамера в корпусе типа «bullet»
Взрывозащищенная тепловизионная видеокамера в корпусе типа «bullet» -
 KDW127-12 Рудничный стабилизированный источник постоянного тока в заливном и взрывобезопасном исполнении
KDW127-12 Рудничный стабилизированный источник постоянного тока в заливном и взрывобезопасном исполнении -
 Взрывозащищенная видеокамера с воздушным/водяным охлаждением
Взрывозащищенная видеокамера с воздушным/водяным охлаждением -
 Взрывозащищенная сферическая видеокамера (ИК)
Взрывозащищенная сферическая видеокамера (ИК) -
 Видеокамера взрывозащищенная на поворотной платформе
Видеокамера взрывозащищенная на поворотной платформе -
 Взрывозащищенная видеокамера с выносной ИК-подсветкой и дворником
Взрывозащищенная видеокамера с выносной ИК-подсветкой и дворником -
 Взрывозащищенная вертикальная моноблочная видеокамера с постоянной скоростью панорамирования
Взрывозащищенная вертикальная моноблочная видеокамера с постоянной скоростью панорамирования -
 KBA12D Рудничная видеокамера во взрывобезопасном исполнении
KBA12D Рудничная видеокамера во взрывобезопасном исполнении -
 BXJ-51 Взрывозащищенная коммутационная коробка
BXJ-51 Взрывозащищенная коммутационная коробка -
 KBA12(W) Рудничная видеокамера во взрывобезопасном исполнении
KBA12(W) Рудничная видеокамера во взрывобезопасном исполнении -
 FJF12 Рудничный лазерный излучатель во взрывобезопасном исполнении
FJF12 Рудничный лазерный излучатель во взрывобезопасном исполнении -
 KBA12C Рудничная видеокамера с системой пылеподавления во взрывобезопасном исполнении
KBA12C Рудничная видеокамера с системой пылеподавления во взрывобезопасном исполнении
Связанный поиск
Связанный поиск- мурманск промышленная улица 36 черная камера
- веб камера промышленная
- взрывозащищенный корпус видеокамеры
- Рудничный взрывозащищённый и искробезопасный источник постоянного стабилизированного питания
- Взрывозащищённый дисплей
- лазерный детектор метана лпд м 30
- Детектор метана
- usb камера промышленная
- Взрывозащищённый шкаф питания
- Рудничный взрывозащищённый электроуправляемый шкаф