





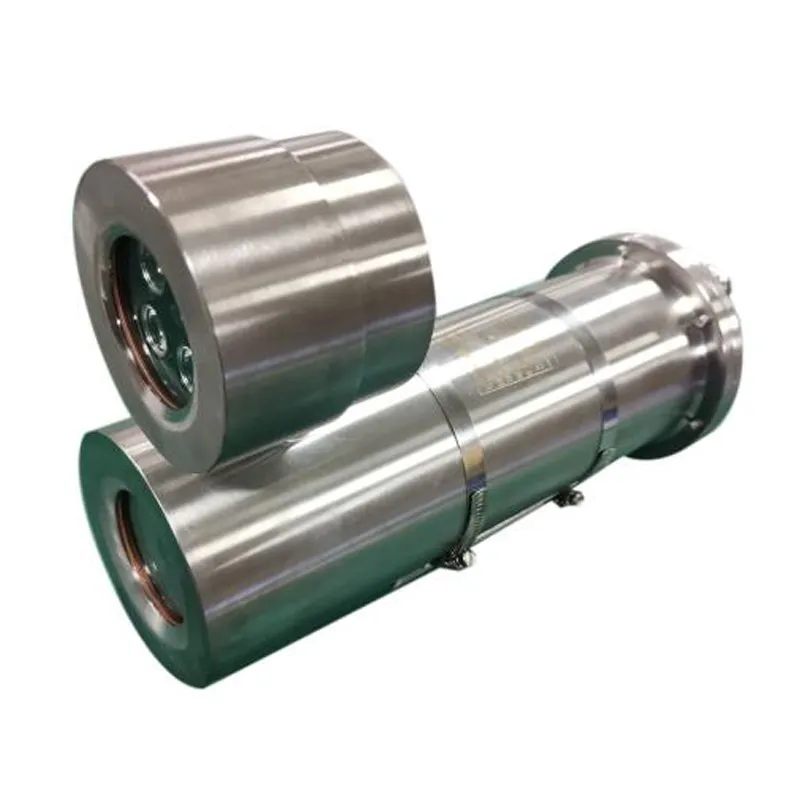
Двухосевой электроприводной поворотная платформа для фиксированных подводных видеокамеров промышленного назначения
Когда слышишь про двухосевой электроприводной поворотная платформа, многие сразу представляют себе что-то вроде роботизированной руки для камеры, только под водой. Но ключевое тут — ?для фиксированных подводных видеокамер промышленного назначения?. Это не про творческую съемку, это про мониторинг, инспекцию, безопасность в условиях, где человеку лучше не появляться. И сразу первый нюанс, который часто упускают: такая платформа — это не самостоятельный продукт, а часть системы, и её задача — расширить обзор у камеры, которая изначально ?смотрит? в одну точку. Основная сложность — не просто крутить камеру, а делать это надежно, с точным позиционированием, под давлением, в агрессивной среде, и чтобы сервоприводы не боялись долгой работы на одном угле.
Где и зачем это нужно? Неочевидные сценарии
Очевидные места — это подводные трубопроводы, дноочистные сооружения, гидротехнические объекты. Но есть и менее очевидные. Например, мониторинг водозаборных узлов на промышленных предприятиях, где нужно контролировать состояние решеток и отсутствие засоров. Или — что ближе к нашему профилю — шахтные водоотливные комплексы. Там тоже вода, часто с взвесями, и нужно дистанционно оценить состояние насосов, клапанов. Вот тут и встает вопрос о взрывозащищенном исполнении. Не всякая подводная платформа на это рассчитана.
Мы как-то работали над проектом для угольного разреза. Задача была — установить камеры для наблюдения за подводной частью отстойника. Заказчик изначально хотел просто герметичный корпус для камеры. Но после обсуждения стало ясно, что без возможности панорамирования эффективность мониторинга близка к нулю. Пришлось проектировать поворотную платформу с электроприводом, способную работать в мутной воде с абразивными частицами. И это был первый важный урок: интерфейс между механикой платформы и оптикой камеры должен быть абсолютно защищен от проникновения этих частиц, иначе подшипники заклинит за неделю.
В этом контексте стоит упомянуть компании, которые глубоко погружены в тему специализированного, в том числе взрывозащищенного, видеонаблюдения для сложных условий. Например, ООО ?Цзянсу Аньцзинь Электрическая Технология? (сайт: https://www.jsajdq.ru). Это предприятие полного цикла, которое как раз специализируется на разработке и производстве взрывозащищенного и взрывобезопасного оборудования для шахт, включая видеонаблюдение. Их опыт в создании надежных оболочек и систем для работы во взрывоопасных средах косвенно подтверждает, насколько высоки должны быть требования к любой подвижной механике, предназначенной для подобных задач, даже под водой. Их портфолио — хороший ориентир по уровню защиты.
Конструктивные ?подводные камни? и выбор привода
Самый больной вопрос — привод. Шаговый двигатель или сервопривод? Для точного позиционирования в двух осях (горизонтальное панорамирование и вертикальный наклон) теоретически лучше сервопривод. Но на практике, для многих промышленных задач, где не нужна сверхвысокая скорость и точность до градуса, достаточно качественного шаговика с закрытым контуром обратной связи (энкодером). Почему? Надежность, простота управления, устойчивость к перегрузкам. Сервопривод в подводном исполнении — это дорого и капризно, особенно если речь о поддержании позиции под переменной нагрузкой (течения, налипание).
Второй момент — уплотнения. Сальниковые набивки? Нет, только торцевые механические уплотнения, причем двойные, с полостью для индикаторной жидкости. Ось, на которой вращается камера, — это потенциальная точка входа воды. Один неудачный проект с сальниками в соленой воде закончился заменой всего узла через три месяца. Вода просочилась, коррозия съела контакты датчика положения.
И третий — материал. Нержавеющая сталь AISI 316L — стандарт для морской воды. Но для пресных, но химически агрессивных сред (скажем, стоки) иногда лучше подходит дуплексная сталь или даже специальные покрытия на алюминиевом сплаве. Всегда нужно запрашивать у заказчика полный химический анализ среды. Однажды поставили платформу из стандартной 316-й стали в воду с высоким содержанием хлоридов и низким pH — началась точечная коррозия. Пришлось переделывать.
Про интерфейсы и управление
Здесь тоже много тонкостей. Промышленный протокол — Modbus RTU поверх RS-485 — это практически must-have. Он позволяет интегрировать платформу в общую SCADA-систему объекта. Wi-Fi или Bluetooth под водой не работают, так что кабельное соединение — единственный вариант. И в кабеле должны быть не только силовые жилы для двигателей, но и витая пара для данных, и отдельные проводники для датчиков (например, датчика перегрева двигателя).
Частая ошибка при монтаже — неправильная укладка этого кабеля. Он должен иметь запас на вращение, но не создавать петлю, которая может за что-то зацепиться. Лучше использовать специальные кабельные вводы с вращающимся соединением (slip ring), но это удорожает конструкцию. Для ограниченного угла поворота (например, 350 градусов по азимуту) можно обойтись без него, грамотно рассчитав длину кабельной петли в защитной гибкой гофре.
Из личного опыта: случай с вибрацией
Хочу поделиться одним неудачным, но поучительным моментом. Мы тестировали прототип платформы в испытательном бассейне. Все работало идеально: плавный ход, точное позиционирование. Но когда смонтировали её на реальном объекте — на кронштейне, приваренном к металлической конструкции водовода, — возникла сильная вибрация изображения при повороте. Казалось бы, платформа жесткая, привод мощный.
Оказалось, проблема в резонансе. Частота вращения двигателя совпала с собственной частотой колебаний не самой платформы, а всей монтажной конструкции. Двигатель был закреплен жестко на корпусе платформы, и малейший дисбаланс (а он есть всегда) раскачивал всю систему. Решение было не в усилении конструкции, а в изменении алгоритма управления. Мы добавили плавный разгон и торможение (S-образную кривую скорости), уйдя от резонансных частот, и установили демпфирующие прокладки между платформой и монтажным кронштейном. Это добавило полсекунды к времени позиционирования, но полностью устранило проблему. Вывод: лабораторные испытания должны включать имитацию реальных условий крепления, а не только работу ?в воздухе? или в спокойной воде.
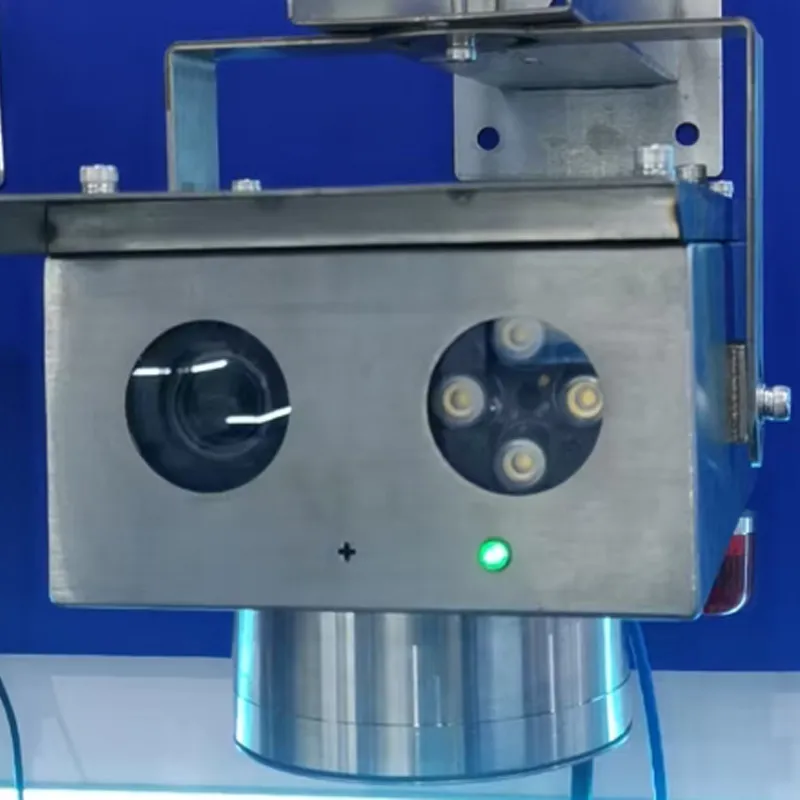
Интеграция с камерой: что важнее мегапикселей?
Заказчики часто гонятся за высоким разрешением камеры, забывая про оптику и освещение. Для подводных видеокамер промышленного назначения на поворотной платформе свет — это всё. Даже самая дорогая камера в мутной воде без правильной подсветки ничего не увидит. Поэтому платформа должна иметь либо встроенные светодиодные прожекторы, синхронно поворачивающиеся с камерой, либо надежные интерфейсы для подключения внешнего освещения.
Еще один момент — вес и балансировка. Камеры бывают разные: компактные цилиндрические и крупные корпусные. Центр тяжести должен быть как можно ближе к точке пересечения осей вращения, иначе двигатель наклона будет работать с перегрузкой, удерживая несбалансированный момент. В нашей практике был кейс, когда пришлось проектировать сменные крепления-противовесы под разные модели камер от одного производителя. Это добавило гибкости в поставку.
И последнее по этой части — обогрев. Если эксплуатация предполагается в холодной воде, на внутренней стороне стекла купола может выпадать конденсат. Нужен либо пассивный осушитель (силикагель) в гермообъеме, либо активный обогрев стекла. Без этого в первый же перепад температур изображение ?затуманится? изнутри, и никакая поворотная платформа не поможет.
Вместо заключения: о надежности и обслуживании
Главный критерий для такого оборудования — не максимальные характеристики, а стабильность работы и ремонтопригодность. Средний срок службы должен исчисляться годами без капитального вмешательства. Поэтому в конструкции нужно закладывать возможность замены уплотнений, подшипников, приводных ремней (если они есть) без демонтажа всей платформы со дна. Иногда это значит использование разборных корпусов вместо сварных, что усложняет сертификацию на глубину, но окупается в долгосрочной перспективе.
Работая с такими системами, постоянно приходится искать баланс между стоимостью, сложностью и надежностью. Идеальной универсальной двухосевой электроприводной поворотной платформы не существует. Каждый проект — это адаптация под конкретную глубину, среду, задачи мониторинга и бюджет. Опыт, в том числе негативный, как в истории с вибрацией, — самый ценный актив в этом деле. Именно он позволяет не просто продавать железо, а предлагать работоспособное техническое решение, которое будет годами выполнять свою функцию там, где человеку делать нечего.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Взрывозащищенная видеокамера с воздушным/водяным охлаждением
Взрывозащищенная видеокамера с воздушным/водяным охлаждением -
 KJJ12 Рудничный коммутатор во взрывобезопасном исполнении
KJJ12 Рудничный коммутатор во взрывобезопасном исполнении -
 FJF12 Рудничный лазерный излучатель во взрывобезопасном исполнении
FJF12 Рудничный лазерный излучатель во взрывобезопасном исполнении -
 KBA12Q Рудничная сферическая видеокамера во взрывобезопасном исполнении
KBA12Q Рудничная сферическая видеокамера во взрывобезопасном исполнении -
 KBA12(A) Рудничная видеокамера с обработкой изображения во взрывобезопасном исполнении (средняя/низкая скорость)
KBA12(A) Рудничная видеокамера с обработкой изображения во взрывобезопасном исполнении (средняя/низкая скорость) -
 KBA127S Рудничная видеокамера в заливном и взрывобезопасном исполнении
KBA127S Рудничная видеокамера в заливном и взрывобезопасном исполнении -
 Взрывозащищенная видеокамера с выносной ИК-подсветкой
Взрывозащищенная видеокамера с выносной ИК-подсветкой -
 KBA12 Рудничная видеокамера с обработкой изображения во взрывобезопасном исполнении (стандартная)
KBA12 Рудничная видеокамера с обработкой изображения во взрывобезопасном исполнении (стандартная) -
 KBA12R Рудничная тепловизионная видеокамера во взрывобезопасном исполнении
KBA12R Рудничная тепловизионная видеокамера во взрывобезопасном исполнении -
 Взрывозащищенный видеомонитор
Взрывозащищенный видеомонитор -
 KBA12(B) Рудничная видеокамера во взрывобезопасном исполнении
KBA12(B) Рудничная видеокамера во взрывобезопасном исполнении -
 KBA12(W) Рудничная видеокамера во взрывобезопасном исполнении
KBA12(W) Рудничная видеокамера во взрывобезопасном исполнении
Связанный поиск
Связанный поиск- промышленная камера эндоскоп
- Рудничный взрывозащищённый и искробезопасный коммутатор
- шкаф распределительный взрывозащищенный
- Промышленная камера
- видеокамера взрывозащищенная релион
- Подводная поворотная платформа для видеокамеры
- Камера с детектором метана
- Взрывозащищённая интегрированная тепловизионная камера
- Взрывозащищённая клеммная распределительная коробка
- Взрывозащищенная сферическая видеокамера (ИК)